事例:コントロールバルブ
1. モデル概要
本モデルの概要は以下のとおりです。
- 中央部にコントロールバルブを含むパイプライン(200m)の簡易モデルです。
- 下流端に様々な圧力変動を与えて過渡解析を行います。
- 流量が一定に制御されるようにコントロールバルブのパラメータを調節します。
- コントロールバルブの設定流量を変更して過渡解析を行います。
- 設定流量に対して、コントロールバルブの開度が適切に追従していることを確認します。
2. システム構成とモデル化
上流端(左側)と下流端(右側)の境界条件の圧力差によって流体が流れます。パイプライン中央部のコントロールバルブによって流量を制御します。下流端の圧力に任意の波形を与えることができます。
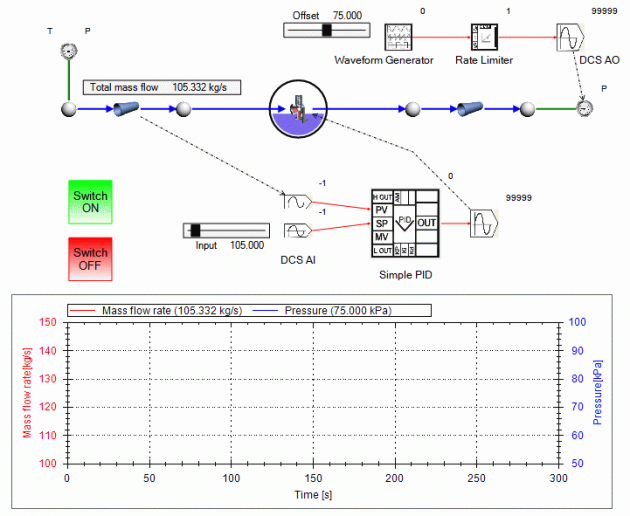
図 1 コントロールバルブを含むパイプラインモデル
3. PID制御パラメータの設定
コントロールバルブのPID制御の設定画面です。ここで比例ゲイン、積分ゲインおよび微分ゲインを調節します。
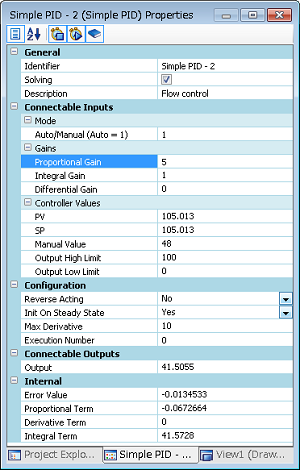
図 2 PIDゲインの設定画面
4. バルブ特性の設定
コントロールバルブの開度と損失係数の設定画面です。この他にも最大開度でのCv値などを設定します。バルブ選定の際の参考にすることができます。
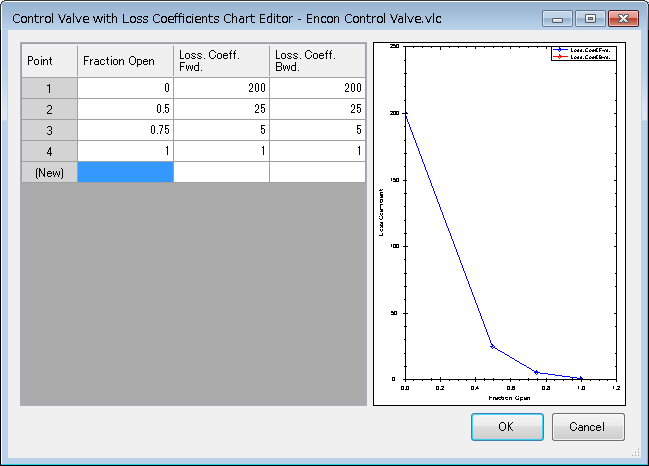
図 3 バルブ開度と損失係数の関係
5. 圧力変動に対する流量制御の検証
下流端の圧力に様々な変動を与えて、流量が一定の範囲に保たれているかどうかを確認します。
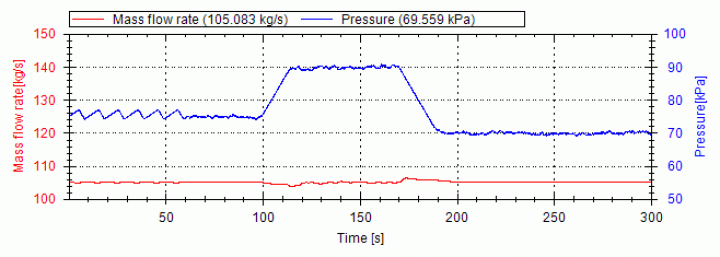
図 4 圧力変動下における流量制御の結果
シナリオタイムライン:
- 0秒: 下流端にのこぎり波(周期10秒、振幅2kPa)の圧力変動を与えます。
- 60秒: ランダムなノイズに変更します。
- 100秒: 圧力設定値を75kPaから90kPaに変更します。
- 170秒: 圧力設定値を70kPaにします。
6. 設定流量変更に対する追従性の検証
コントロールバルブのPID制御によって、流量が設定どおりになっているかどうかを確認します。
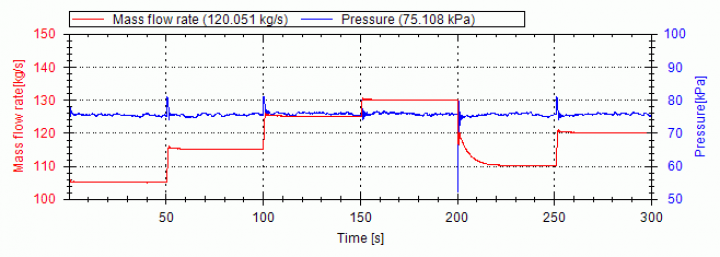
図 5 流量設定値変更に対するバルブの追従性
流量設定値の変更タイムライン:
- 50秒: 流量設定値を105kg/sから115kg/sに変更します。
- 100秒: 流量設定値を125kg/sにします。
- 150秒: 流量設定値を130kg/sにします。
- 200秒: 流量設定値を110kg/sにします。
- 250秒: 流量設定値を120kg/sにします。